

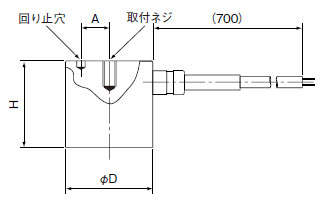
| ストック番号 | 型 式 | 寸法 (mm) | 取付ネジ | 回り止穴 | 電圧(V) | 電流(A) | 最大吸着力 | 重量(kg) | ||
|---|---|---|---|---|---|---|---|---|---|---|
| øD | H | A | ||||||||
| S961102 | KLRM20 | 20 | 28 | なし | M4 深8 | – | 24 | 0.06 | 28N (2.8kgf) | 0.07 |
| S961103 | KLRM30 | 30 | 40 | 10 | M6 深12 | 4キリ深3 | 0.17 | 180N (18kgf) | 0.2 | |
| S961104 | KLRM40 | 40 | 15 | 0.24 | 300N (30kgf) | 0.35 | ||||
| S961105 | KLRM50 | 50 | 50 | 18 | M8 深15 | 5キリ深4 | 90 | 0.11 | 600N (60kgf) | 0.7 |
| S961106 | KLRM60 | 60 | 60 | 20 | M10 深20 | 0.2 | 1200N (120kgf) | 1.2 | ||
| S961107 | KLRM80 | 80 | 6キリ深6 | 0.29 | 2400N (240kgf) | 2.1 | ||||
| S961108 | KLRM90 | 90 | M12 深20 | 0.35 | 3300N (330kgf) | 2.7 | ||||
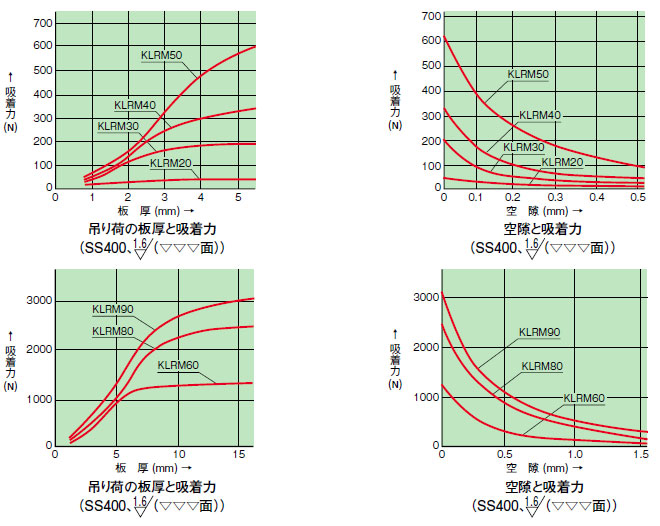
最大吸着力は、厚鋼板(t=50mm以上、材質SS400)にて、吸着面 ▽▽▽面の時の吸着力を表示しています。
▽▽▽面の時の吸着力を表示しています。

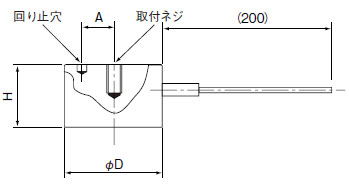
| ストック番号 | 型 式 | 寸法 (mm) | 取付ネジ | 回り止穴 | 電圧(V) | 電流(A) | 最大吸着力 | 重量(kg) | ||
|---|---|---|---|---|---|---|---|---|---|---|
| øD | H | A | ||||||||
| S961112 | KLRM20B | 20 | 20 | なし | M4 深5 | – | 24 | 0.07 | 10N (1kgf) | 0.04 |
| S961113 | KLRM30B | 30 | 10 | M6 深10 | 3キリ深2 | 0.08 | 100N (10kgf) | 0.08 | ||
| S961114 | KLRM40B | 40 | 15 | 0.09 | 220N (22kgf) | 0.15 | ||||
| S961115 | KLRM50B | 50 | 25 | 18 | M8 深12 | 90 | 0.1 | 500N (50kgf) | 0.3 | |
| S961116 | KLRM60B | 60 | 30 | 20 | M10 深16 | 4キリ深3 | 0.21 | 1000N (100kgf) | 0.5 | |
| S961117 | KLRM80B | 80 | 0.32 | 2000N (200kgf) | 0.9 | |||||
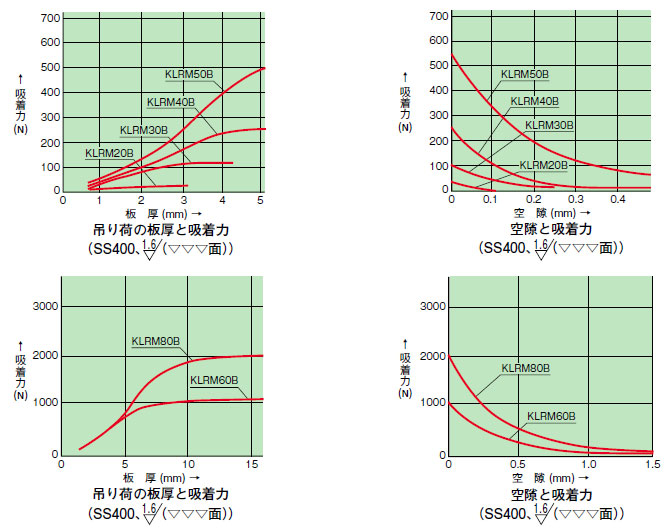
最大吸着力は、厚鋼板(t=50mm以上、材質SS400)にて、吸着面▽▽▽面の時の吸着力を表示しています。

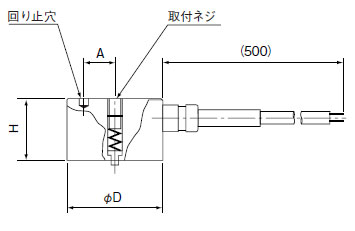
| ストック番号 | 型 式 | 寸法(mm) | 取付ネジ | 回り止穴 | 押ピン圧力 (kg) |
電圧 DC(V) | 電流 (A) | 最大吸着力 | 重量(kg) | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| φD | H | A | |||||||||
| S961123 | KLRM30S | 30 | 25 | 10 | M6-深7 | 4キリ深3 | 0~1.0 | 24 | 0.09 | 30N (3kgf) | 0.13 |
| S961124 | KLRM40S | 40 | 15 | 0.16 | 110N (11kgf) | 0.20 | |||||
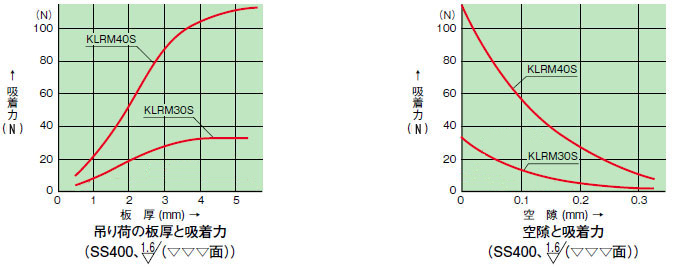
最大吸着力は、厚鋼板(t=50mm以上、材質SS400)にて、吸着面▽▽▽面の時の吸着力を表示しています。

